Research Interests
Security and Privacy in Networked Control Systems
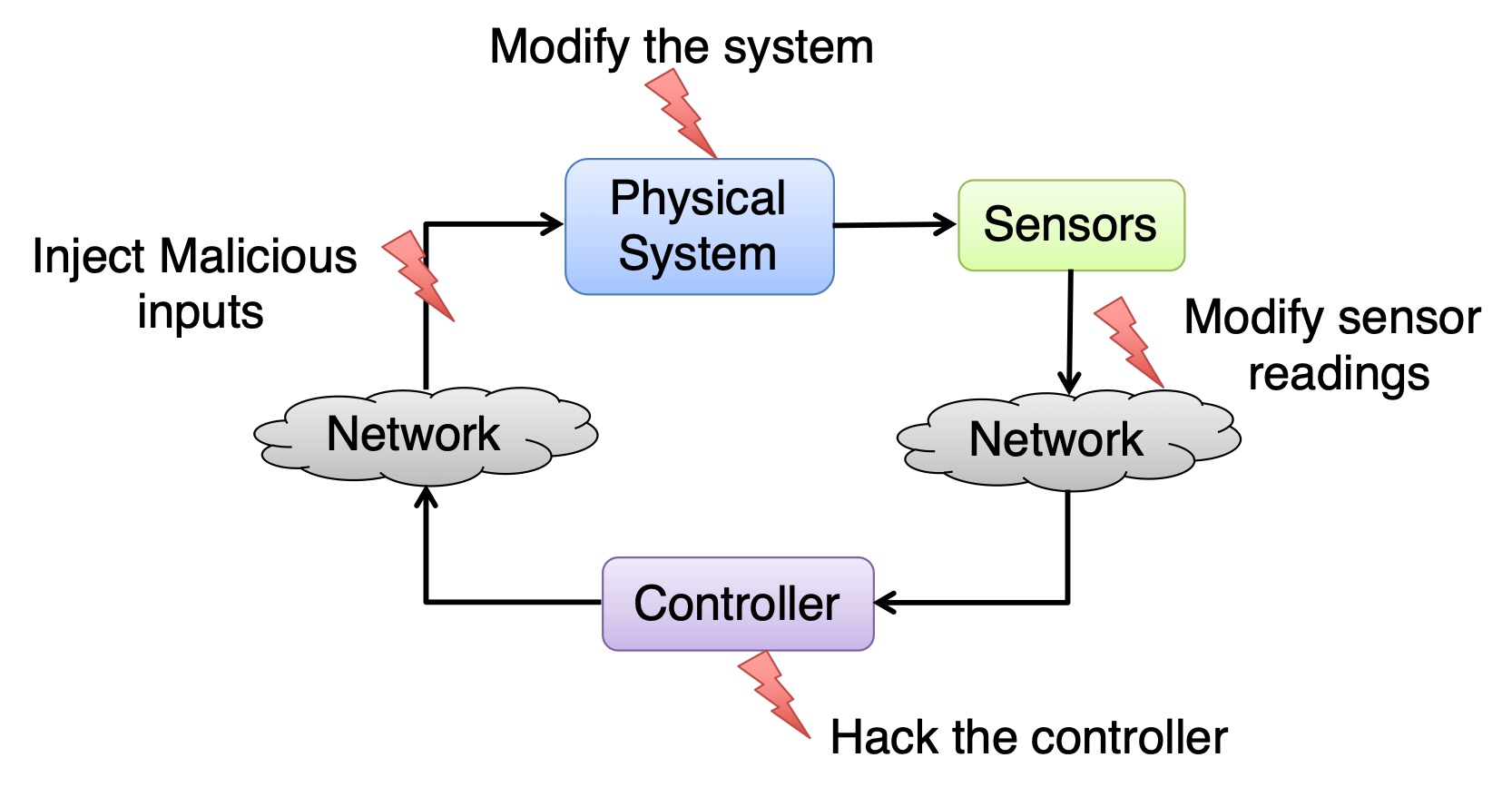
Communication and computation technologies are an integral part of modern control systems, and they are becoming more smart, efficient and distributed in nature. However, these system are also vulnerable to attacks at both cyber and physical layers, as well as privacy breaches. Such attacks and privacy breaches are common in critical infrastructures like smart grids, transportation networks, and autonomous systems, all of which fall under the general class of Cyber-Physical Systems (CPS).
We study different aspects of security in CPS including attack design, detection and mitigation. We develop underlying mathematical models of the system and cyber-physical attacks. Using these models, we propose and compare different strategies to detect attacks in a networked and interconnected system. We are also working on developing more sophisticated and coordinated attack models and analyze their affect of the system performance, with an eventual goal to develop countermeasures for such advanced attacks.
Information exchange among different agents in CPS makes them vulnerable to privacy breaches. We develop mathematical frameworks to implement privacy by limiting the information exchange or making the information more inaccurate, and analyze their effect on system performance. We also look at the role of cooperation in implementing the privacy. Further, we are interested in identifying fundamental connections and trade-offs between security and privacy.
Analysis and Design of Sparse Systems
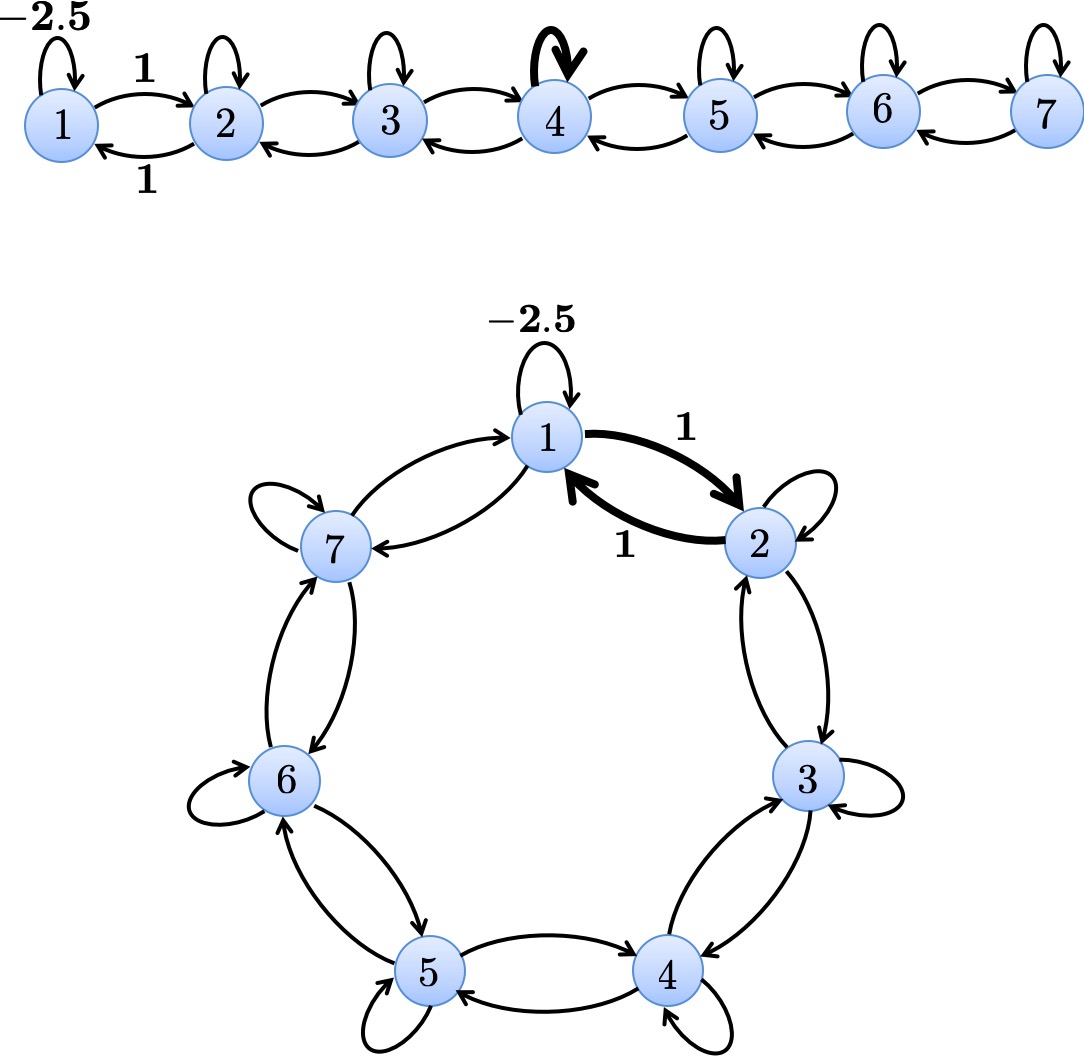
Dynamical systems consist of multiple agents like sensors, controllers and other devices that are distributed over a geographical area. These agents are coupled due to physical connections or communication links. Thus, the whole system has an inherent decentralized and sparse structure, and any design and analysis of these systems should take into account this underlying sparsity constraints. We study different properties of such sparse systems such as stability, robustness and controllability, which have been looked at before in unstructured systems.
Our contribution is to take the underlying structure into account, which poses additional non-trivial challenges. We develop optimal sparse controllers for pole placement in linear systems. Further, we compute the robustness of these systems under sparse perturbations with respect to stability and observability. These studies help us to identifying vulnerable/strong points in the system and provide insights into the design of these sparse systems.
Data-driven and Learning-based Techniques for Control and Estimation
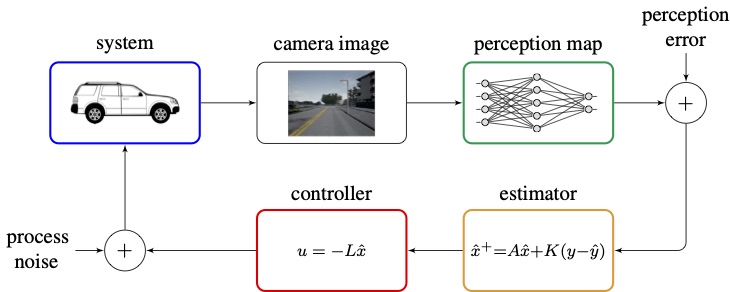
Cyber-Physical Systems are often complex in nature and it is very difficult to develop a precise model from physical laws that captures all the interdependencies of the system. In such cases, the data and signals generated by the system can be used to develop the system model and/or compute control inputs and state estimates. We develop such data-driven algorithms for estimation and control without assuming the knowledge of the system model.
Often such data-driven and learning based models/algorithms are obtained numerically, and their functioning and robustness is not well understood under unknown environments. For example, there are many instances where self-driving cars have crashed and their behavior remains unpredictable. We show that when we optimize the performance of CPS, it invariably leads to them being less robust. Thus, we identify a fundamental trade-off between performance and robustness, and show that they are at odds with each other. This helps us to understand the functioning, develop appropriate design methods, and predict the functioning under unknown environments of these learning based control techniques.
Sensor Management for Detection and Estimation
Dynamical systems consist of multiple sensors that provide real-time information about different components or signals in the system. These sensors are distributed throughout the system and their data is used to make important decisions, for instance, to compute appropriate control inputs and detect/monitor faults or attacks in the system. Due to communication, computational, cost or power constraints, these sensor cannot be deployed everywhere in the system and cannot transmit their data simultaneously at all times. In such scenarios, it becomes important to identify where to place the sensors and when to transmit data from which sensor.
We study such sensor management strategies for detection problems in dynamical systems. We develop both online and off-line sensor selection policies that maximize the detection performance of the system. Further, we identify how the location of the sensors in a networked dynamical system affects the detection performance, and provide guidelines for sensor placement in such systems.
Communication Protocols for Networked Control Systems
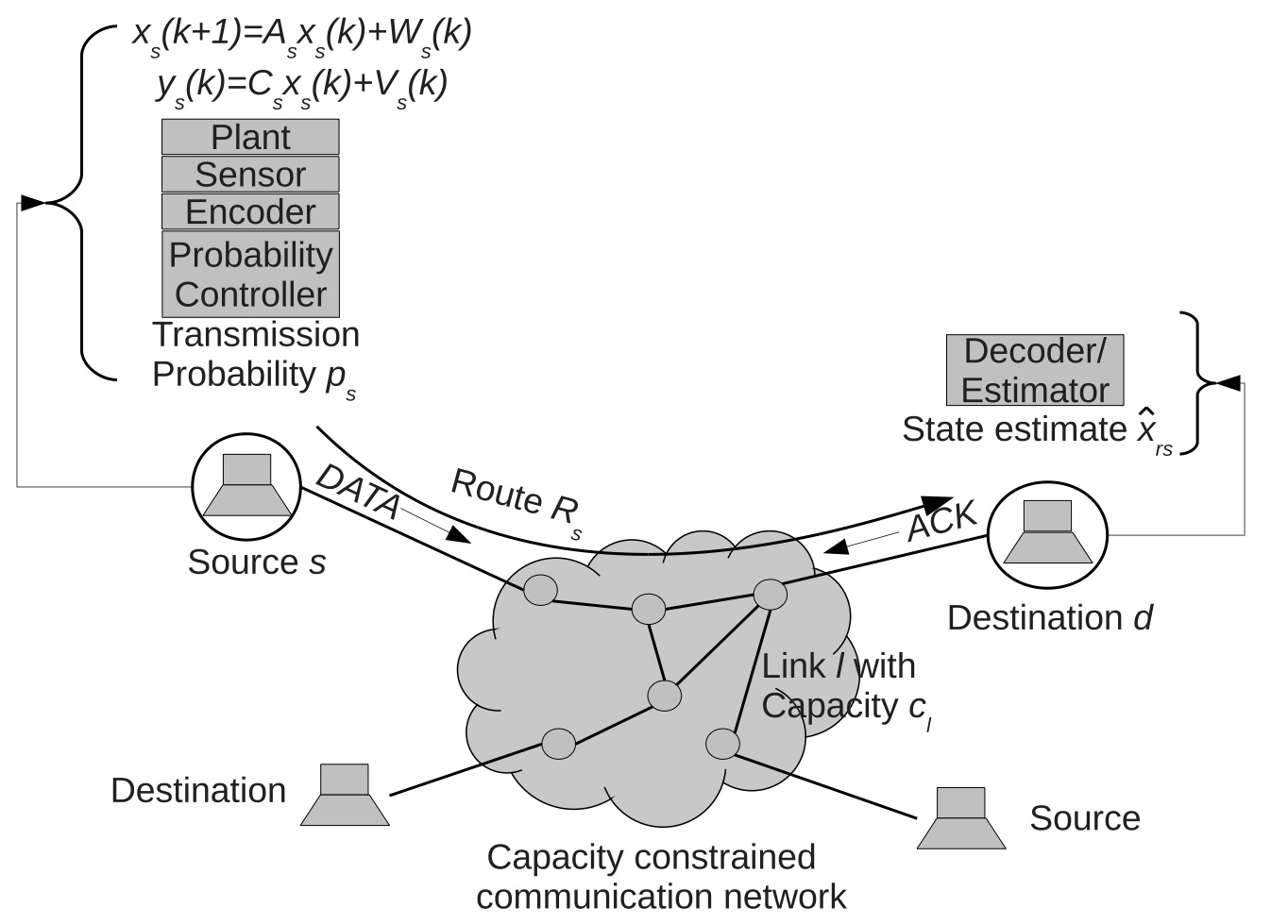
Traditional communication protocols were designed based primarily with the goal of reliable data transfer. In contrast, Networked Control Syatems have estimation and control-oriented objectives, where the performance metric is a complicated function of delay, throughput, and reliability; hence, traditional network protocols may not be suitable for such applications.
We develop a routing protocol for a networked estimation application, where multiple sensors want to transmit their data to their destinations over a rate-limited network. Using the Network Utility Maximization framework, we design an optimal stochastic protocol with probabilistic transmissions that reduces the congestion in the network and maximizes the estimation performance. The algorithm is similar in structure to the standard TCP and can be implemented seamlessly in existing networks.